

Welcome to uavster's blog (filtered)
You are currently browsing posts related to SLAM. Perhaps you prefer to browse all posts.
The relative pose problem: A chronology
I have been investing some time in reading about the relative pose problem during the last weeks. My aim is to develop a monocular SLAM system for mobile devices, as part of my Perceptive [...]
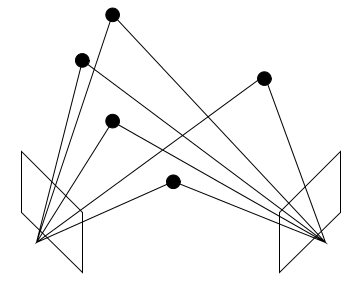
We have two images of the same 3D scene from two different viewpoints. There is a set of scene points that appears in both images and we know which point in image 1 corresponds to which point in image [...]
Whereas this problem might look pretty modern in the first instance —a product of the digital age, the era of 3D graphics and augmented reality—, it turns out to be century-old. As I found [...]
We got two awards in IMAV 2012!
Home, sweet home. My luggage is laying on the floor, as exhausted as me. I arrived yesterday from Braunschweig, Germany, but went straight to bed for a mandatory energy charge. I slept for an insane number [...]
1) Special Award for the "Best Automatic Performance"
2) 2nd place in the Indoor Flight Dynamics Challenge
According to the organization, our drone was the first one in the history of the competition to pass the challenge without any human intervention, entirely on its own. This is the reason [...]
My colleague Jesús Pestana did an amazing job with the position estimation and high-level controllers (trajectory and mission). My contributions were the software framework, visual speed estimation, [...]